文章目录[隐藏]
1.力的概念
人们在日常生活和劳动中发现,任何两个物体在相互作用时,它们的运动状态(即它们的速度大小和方向,或二者之一. )都会发生变化。随着生产力的发展.生产实践的丰富和人们认识水平的不断提高,人们逐步建立了力的科学概念。力是物体间的相互作用,这种作用使得物体的运动状态发生变化,同时物体也发生变形。如果没有物体间的相互作用,力便不可能存在。
力作用于物体,使得物体运动状态发生改变的效应称为力的外效应;而力使物体产生变形的效应称为力的内效应。
实践表明,描述力的作用需要三个基本要素,即力的大小、力的作用方向(包括方位和指向)、力的作用点(力的作用位置)。只要三个要素之一发生改变 ,力的作用效应就会发生变化。力的国际单位是N,称为牛顿,简称为牛。在工程单位制中,取北纬45°海平面上地球吸引质量为1 kg(千克)的标准砝码所产生的力作为力的单位,这个力的单位为kgf(千克力)。因此,牛顿和千克力的换算关系为:1 kgf=9.8 N。
力是矢量,力对物体的作用效应不仅取决于它的大小,还取决于它的方向。力的三要素可以用一个矢量表示出来,即力可以用有向线段来表示,如图1所示。线段的长度按一定比例表示力的大小(图中F的大小为8 N,比例尺每格代表1 N);线段的方位和箭头表示力的方向;线段的起点(或终点)表示力的作用点。经过力的作用点沿力的方向引出的直线称为力的作用线。
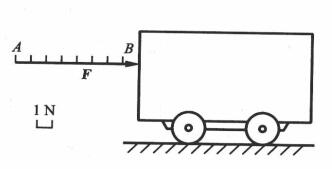
图1力的矢量表示
力的矢量通常用黑体字母表示(如F) ,其大小则用普通字母表示(如F)。
2 刚体的概念
在研究力对物体的效应时,通常将所考虑的物体作为刚体看待。所谓刚体,就是在力的作用下,其大小和形状都保持不变的物体。实际上,任何物体受力后都将发生形状的改变并产生变形。但在正常情况下,工程.上的机械零件和结构构件在力的作用下发生的变形很微小,对研究力的运动状态及平衡问题影响很小,常常可以忽略不计。故刚体的概念是建立在人们对实际物体的一-种理想化构想之上的,它是一个理想化的力学模型。
3 平衡的概念
平衡是指物体相对于参照物(如地球)处于静止或做匀速直线运动的状态。显然,平衡是物体机械运动的特殊形式,因为运动是绝对的,平衡、静止是相对的。作用在刚体,上使刚体处于平衡状态(即运动状态不变)的力系称为平衡力系。平衡力系应满足的条件称为平衡条件。
4 静力学公理
静力学公理是人们在长期的生活和实践中总结出来的最基本的力学规律。这些规律在指导人们实践的过程中被证明是正确的,是符合客观实际的。
4.1二力平衡理论
使受两力作用的刚体保持平衡(见图2)的充分必要条件是:两力大小相等、方向相反,且作用在同一直线 上(简述为等值、反向、共线)。这个结论称为二力平衡定律。对于变形物体,这个条件是必要的,但又是不充分的。例如,绳索受到等值、反向、共线的两个拉力时处于平衡状态,但受到等值、反向、共线的两个压力时就不能平衡。
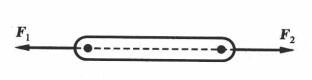
图2 刚体的平衡
在两个力的作用下处于平衡状态的物体称为二力体。在工程上有些杆件自重很轻,往往可以忽略不计,不计自重且只受二力作用而保持平衡的杆件称为二力杆。作用在二力体上的两个力,它们必在两个力作用点的连线上(与杆件的形状无关)且等值、反向,如图3所示。
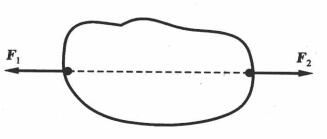
图3 二力体的平衡
4.2力的可传性原理
作用于刚体上的力可沿其作用线移至刚体.上的任一点,而不改变此力对刚体的作用效应。这就是力的可传性原理。如图4所示,作用于刚体上点A处的作用力F,可沿其作用线移动到点B处得到力F'。刚体的状态在力F移动前后并没有发生改变,即力的作用效应相同。
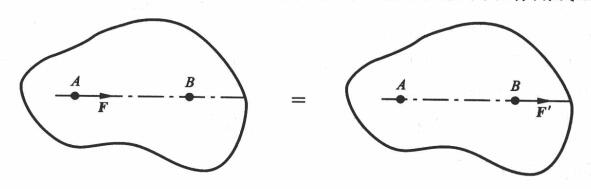
图4力的传递
由力的可传性原理可知,力对刚体的作用取决于力的大小、方向和作用线三个要素。
在这里必须注意的是,力的可传性原理仅仅适用于刚体。对于需要考虑形变的物体,力不能沿其作用线移动,因为移动后将改变物体内部的受力和变形情况。如图5所示的杆AB,.原来受两拉力的作用产生拉伸变形,如图5(a)所示;若将两力沿着作用线分别移动到杆的另一端,如图5(b)所示,杆将因受压而产生压缩变形。
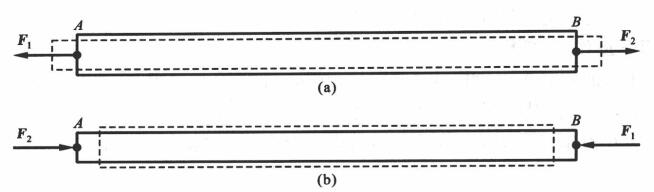
图5杆的拉压与变形
4.3.加减平衡力系理论
在工程实际中,一个物体常常受到几个力的共同作用,通常把作用在物体上的几个力或一组力称为力系,而当物体在力系的作用下处于平衡状态时,又把这样的力系称为平衡力系。在作用于刚体上的任一力系中,加上或减去任意平衡力系,并不改变原力系对刚体的效应,此即为力的可传性原理推论。
4.4.力的平行四边形法则
如果在刚体上作用着两个力,其作用线相交于-点,则它们可以合成为一个力。合力同样作用于同一点,其大小和方向由以两个分力为邻边所构成的平行四边形的对角线来表示,即合力矢量等于它的两个分力的矢量和,如图6(a)所示,其矢量表达式为
FR=F+F2
求两共点力的合力时,为了方便作图,只需要绘出力的平行四边形的一-半就可以了。其方法是自任意0点先画出力矢F1,然后再由F的终端画力矢F2,最后由0点至力矢F2的终端画出力矢FR,FR即F与F2的合力。合力的作用点仍为力F,F2的汇交点O,如图6(b)所示。此作图法遵循的法则称为力的三角形法则。显然,改变F与F2的顺序,其结果不变,如图6(c)所示。
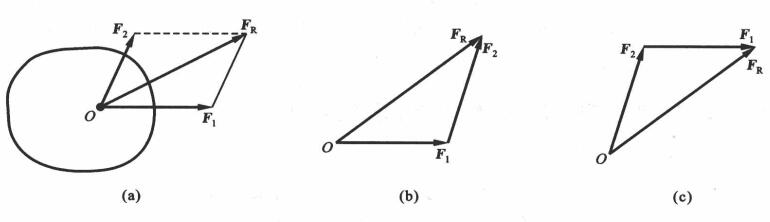
图6力的平行四边形法则及三角形法则
同理,利用力的平行四边形法则或力的三角形法则,可以将一个力分解为两个力,但必须是沿着两个已知方向分解为两个分力。
4.5.三力平衡汇交定理
当刚体受不平行的三个力作用(其中两个力的作用线相交于一点)而平衡时,这三个力的作用线必汇交于一点。如图7所示,三个不平行的力F,Fz,F3作用于刚体上使刚体平衡,由于F和F2的作用线必相交于点O,按力的平行四边形法则作出其合力FR,FR应与F3相平衡,根据二力平衡的条件得出FR应与F3共线,即F3的作用线必通过点0。根据此定理可以确定刚体在受不平行三力而处于平衡时未知力的方向。
4.6.作用与反作用定律
力是物体间的相互作用,当一物体给另一物体以作用力时,同时也要承受其反作用力。即两个物体相互作用时,其作用力总是大小相等、方向相反、作用线相同,分别作用于两个物体上。这两个力互为作用力和反作用力。两者同时存在,互为依存条件,没有作用力就没有反作用力。
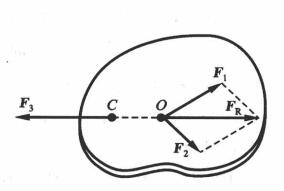
图7刚体的三力平衡



