文章目录[隐藏]
《机械原理》第一章平面机构运动简图及自由度
§1-1 平面机构的组成
1.构件
从运动角度来看,任何机器(或机构)都是由许多独立运动单元体组合而成的,这些独立运动单元体称为构件。
从加工制造角度来看,任何机器(或机构)都是由许多独立制造单元体组合而成零件,这些独立制造单元体称为零件。
构件可以是一个零件;也可以是由一个以上的零件组成。图示内燃机中的连杆就是由单独加工的连杆体、连杆头、轴瓦、螺杆、螺母、轴套等零件组成的。这些零件分别加工制造,但是当它们装配成连杆后则作为一个整体运动,相互之间不产生相对运动。
2.运动副
1)运动副定义
机构中各个构件之间必须有确定的相对运动,因此,构件的连接既要使两个构件直接接触,又能产生一定的相对运动,这种直接接触的活动连接称为运动副。
2) 运动副的分类
(1)按两个构件运动关系分为平面运动副和空间运动副
(2)按其接触形式分:高副点线接触的运动副、低副面接触的运动副。
(3)按其相对运动形式分转动副(回转副或铰链)移动副、螺旋副、球面副。
3.机构
具有固定构件的运动链称为机构。
机架机构中的固定构件;一般机架相对地面固定不动,
原动件: 按给定已知运动规律独立运动的构件;
从动件: 机构中其余活动构件。其运动规律决定于原动件的运动规律和机构的结构和构件的尺寸。
机构常分为平面机构和空间机构两类,其中平面机构应用最为广泛。
§1-2 平面机构运动简图
一、用规定的符号和线条按一定的比例表示构件和运动副的相对位置,并能完全反映机构特征的简图。
二、绘制:
1、运动副的符号
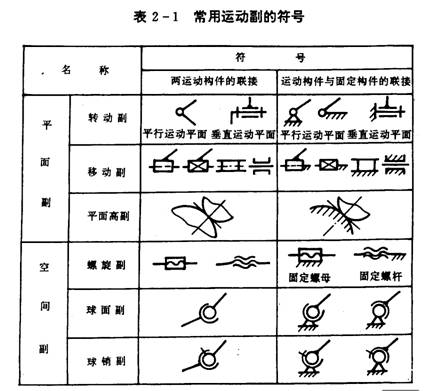
2、构件符号:

3、机构运动简图的绘制,(模型,鄂式破碎机)
1)分析机构,观察相对运动;
2)找出所有的构件与运动副;
3)选择合理的位置,即能充分反映机构的特性;
4)确定比例尺,
5)用规定的符号和线条绘制成间图。(从原动件开始画)
2-1如图2-6所示为以颚式碎矿机。当曲轴2绕其轴心O连续转动时,动颚板3作往复摆动,从而将处于动颚板3和固定颚板6之间的矿石7轧碎。试绘制此碎矿机的机构运动简图。
解:(1)运动分析
(1)运动分析 右图所示

此碎矿机由原动件曲轴2(构件1为固装于曲轴2上的飞轮)、动颚板3、摆杆4、机架5等4个构件组成,固定颚板6是固定安装在机架上的。
曲轴2于机架5在O点构成转动副(即飞轮的回转中心);曲轴2与动颚板3也构成转动副,其轴心在A点(即动颚板绕曲轴的回转几何中心);摆杆4分别与动颚板3和机架5在B、C两点构成转动副。
其运动传递为:电机 皮带 曲轴 动颚板 摆杆。
所以,其机构原动件为曲轴,从动件为摆杆、构件3、机架5共同构成曲柄摇杆机构。
(2)按图量取尺寸,选取合适的比例尺,确定O、A、B、C四个转动副的位置,即可绘制出机构运动简图。最后标出原动件的转动方向。
由图可以看出,O、C在同一垂直线上。量取OA=3mm,AB=25mm,BC=14mm,OC=22mm。
§1-3 平面机构的自由度
机构的自由度:机构中各构件相对于机架所能有的独立运动的数目。
一、计算机构自由度(设n个活动构件,PL个低副,PH个高副)
F=3n-2PL-PH
二、机构具有确定运动的条件(原动件数>F,机构破坏)
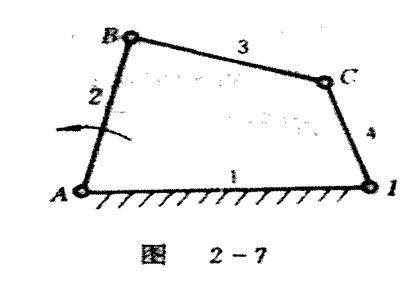
铰链四杆机构
F=3*3-2*4-0=1
原动件数=机构自由度
铰链五杆机构
F=3*4-2*5-0=2
原动件数机构自由度
原动件数<机构自由度数,机构运动不确定(任意乱动)
机构具有确定运动的条件是:机构的自由度数等于机构的原动件数,既机构有多少个自由度,就应该给机构多少个原动件。
:机构的自由度数等于机构的原动件数,既机构有多少个自由度,就应该给机构多少个原动件。三、计算机构自由度时应注意的问题
1.复合铰链
三个或三个以上构件在同一处构成共轴线转动副的铰链,我们称为复合铰链(如图所示)。
若有m个构件组成复合铰链,则复合铰链处的转动副数应为(m-1)个。
2.局部自由度
机构中某些构件具有局部的、不影响其它构件运动的自由度,同时与输出运动无关的自由度我们称为局部自由度。对于含有局部自由度的机构在计算自由度时,不考虑局部自由度。
如图凸轮机构:
如认为:
F=3x3-2x3-1=2
是错误的。
n=2,Pl=2,Ph=1,由公式得:
F=3x2-2x2-1=1。
(3)虚约束:
在特殊的几何条件下,有些约束所起的限制作用是重复的,这种不起独立限制作用的约束称为虚约束。





