一般情况下,定位误差由基准位移误差和基准不重合误差组成。但并不是在任何情况下两种误差都存在。当定位基准与工序基准重合时,ΔB=0,当定位基准无变动时,ΔY=0。
定位误差由基准位移误差与基准不重合误差两项组合而成。计算时,先分别算出ΔY=0和ΔB,然后将两者组合而成ΔD。组合方法为:
如果工序基准不在定位基面上ΔD= ΔY+ΔB
如果工序基准在定位基面上ΔD=ΔY士ΔB
式中“十”、“一”号的确定方法如下:
(1)分析定位基面直径由小变大(或由大变小)时,定位基准的变动方向。
(2)定位基面直径同样变化时,假设定位基准的位置不变动,分析工序基准的变动方向。
(3)两者的变动方向相同时,取“十”号,两者的变动方向相反时,取“一”号。
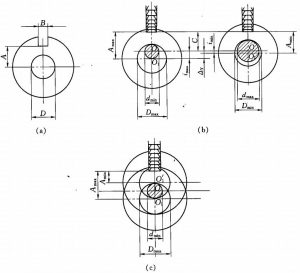
图1 基准位移误差
(1)定位副固定单边接触 如图1b所示,当心轴水平放置时,工件在自重作用下与心轴固定单边接触,此时

(2)定位副任意边接触如图 1c所示,当心轴垂直放置时,工件与心轴任意边接触,此时
![]()
式中:TD一工件孔的公差, mm;
Td一心轴的公差, mm;
Xmin一工件孔与心轴的最小间隙,mm。
在图1中,设A = 40mm士0.1 mm, D= 50+0.03 mm, d= 50-0.01 -0. 04mm,求加工尺寸A的定位误差。
解①定位基准与工序基准重合,ΔB= 0。
②定位基准与限位基准不重合,定位基准单方向移动。其最大移动量为
③ΔD=ΔY=0.03mm。



