任何一个工件,在其位置没有确定前,均有六个自由度,即沿空间坐标轴x、y、z三个方向移动和绕此三坐标轴转动。如图1所示,将未定位工件(双点画线所示长方体)放在空间直角坐标系中,工件可以沿x、y、z轴的直线方向有不同的位置,称做工件沿x、y、z轴的位置自由度,用![]() 、
、![]() 、
、![]() 表示;也可以绕x、y、z轴旋转方向有不同的位置,称做工件绕x、y、z轴的角度自由度,用
表示;也可以绕x、y、z轴旋转方向有不同的位置,称做工件绕x、y、z轴的角度自由度,用![]() 、
、![]() 、
、![]() 表示。用以描述工件位置不确定性的
表示。用以描述工件位置不确定性的![]() 、
、![]() 、
、![]() 和
和![]() 、
、![]() 、
、![]() ,称为工件的六个自由度。
,称为工件的六个自由度。
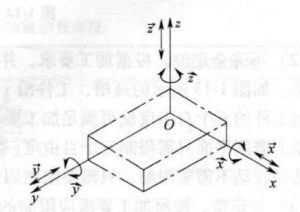
图1未定位工件的六个自由度
工件定位的实质是限制对加工有不良影响的自由度。设空间有一固定点,工件的底面与该点保持接触,那么沿Z轴的位置自由度便被限制了。如果按图2 所示设置六个固定点,工件的三个面分别与这些点保持接触,工件的六个自由度便都被限制了。这些用来限制工件自由度的固定点,称为定位支撑点,简称支撑点。工件定位时,用合理分布的六个支撑点与工件的定位基准相接触来限制工件六个自由度,使工件的位置完全确定,称为“六点定位规则”.
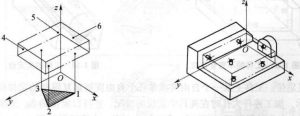
图2 长方体工件定位时支撑点的分布
支撑点的分布必须合理,否则六个支撑点限制不了工件的六个自由度,或不能有效地限制工件的六个自由度。例如,图1中工件底面上的支撑点1、2和3限制了![]() 、
、![]() 、
、![]() ,该3个支撑点应放成三角形,三角形的面积越大,定位越可靠。工件侧面上的支撑点4和5限制
,该3个支撑点应放成三角形,三角形的面积越大,定位越可靠。工件侧面上的支撑点4和5限制![]() 、
、![]() ,支撑点4和5的连线不能垂直于平面xOy,否则工件绕Z轴的角度自由度z便不能被限制。支撑点6限制自由度
,支撑点4和5的连线不能垂直于平面xOy,否则工件绕Z轴的角度自由度z便不能被限制。支撑点6限制自由度![]() 。
。


